































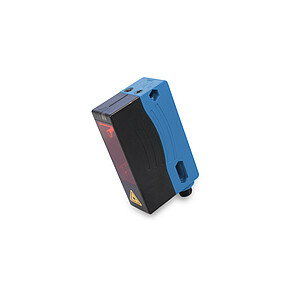



































































optoNCDT 1220 laser sensors are used to position automated guided vehicles and autonomous mobile robots without collisions. The sensors measure the…
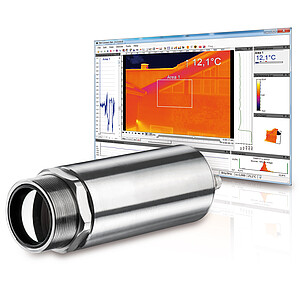
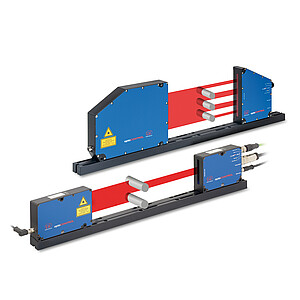
Mills CNC uses Micro-Epsilon laser sensors for the automatic inspection of large, hot-rolled railway fishplates made of steel. These fishplates join…
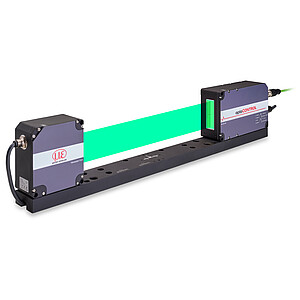
Equipped with the integrated EtherCAT, EtherNet/IP and PROFINET interfaces, the optoNCDT 1900 laser triangulation sensors are now smarter, faster and…