



































































































Vzdálenost
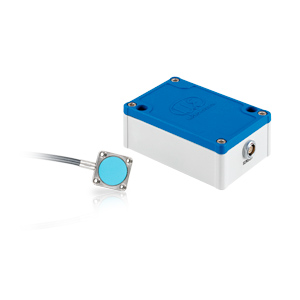
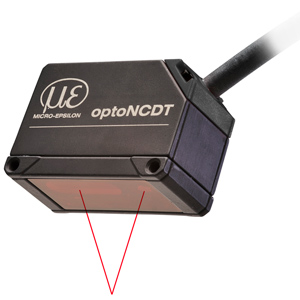
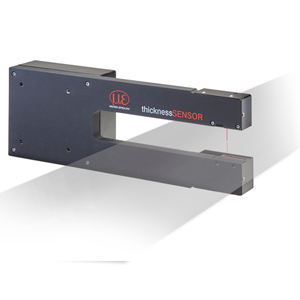
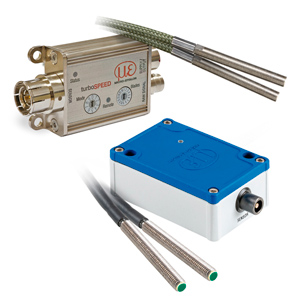
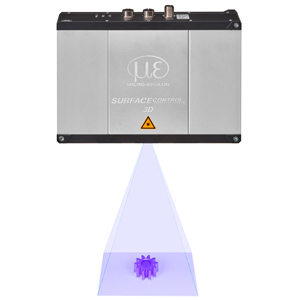
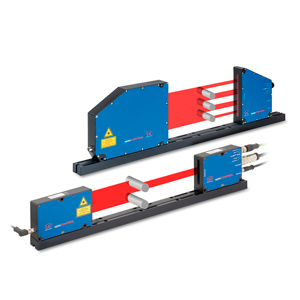
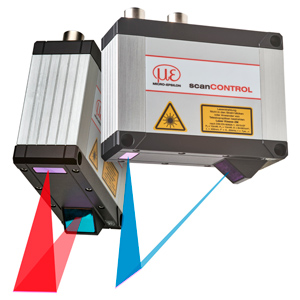
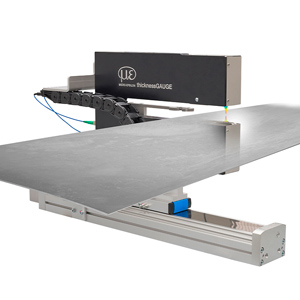
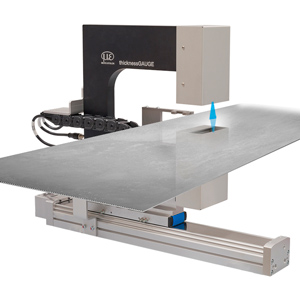
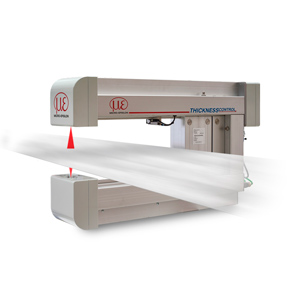
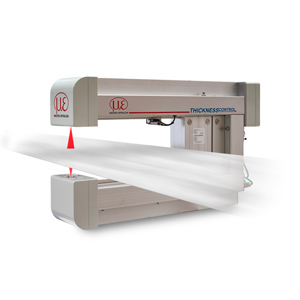
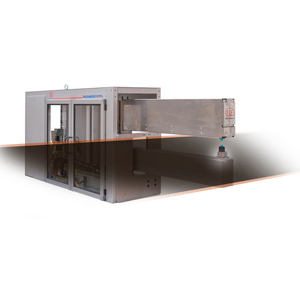
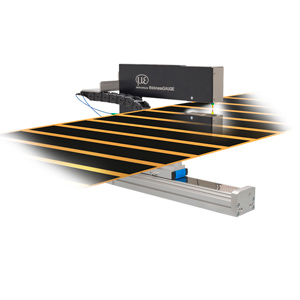
Měření vzdálenosti popisuje měření vzdálenosti mezi dvěma body. Tato vzdálenost je definována v měřicí technice vzdáleností snímače od cíle. Měření vzdálenosti může být také označeno jako měření posunutí nebo polohy. Měření vzdálenosti v geometrické měřicí technice lze nalézt téměř ve všech aplikačních oblastech. K výběru vhodného snímače pro měření vzdálenosti jsou zahrnuty různá kritéria. Frekvence změny vzdálenosti může být kvazi-statická nebo vysoká a určuje rychlost měření senzoru. Kontaktní / bezkontaktní, Rozsah měření (změna posuvu v mm μm), Přesnost příslušné polohy posuvu





















")














